New version 4.0 of Pitlab&Zbig FPV system has new exciting features:
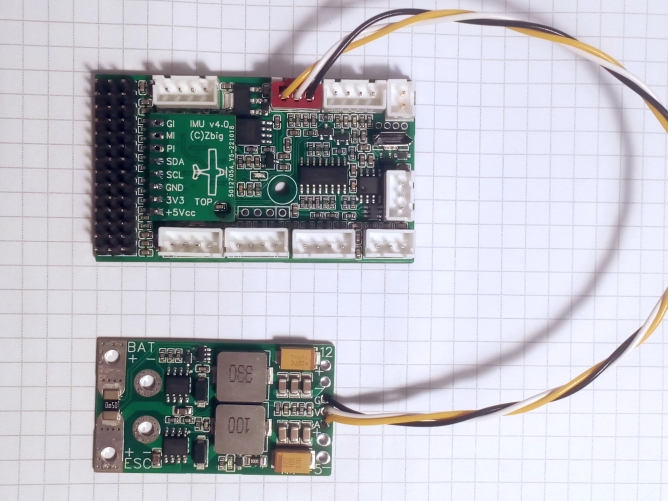
single PCB board integrating autopilot and OSD, powered by dual core ARM processor.
support for 2 cameras with internal video switch. Support for PAL or NTSC.
Higher OSD resolution with better screen coverage (narrower margins).
support for HD systems with MSP_displayport protocol (HD Zero, Avatar and DJI v2 with wtf root). HD works simultaneously with SD (PAL/NTSC), reproducing OSD layout and menu on HD screen.
menu navigation with RC sticks.
Option for external IMU mounting (allows any board position/location).
Extended PWM range for pantilt servos.
All vertical sockets for better accesibility.
Single supply from UBEC.
Processor/IMU/GPS backup from camera/vtx battery.
Fully configurable from FPV_manager application.
Configurable mavlink telemetry.
All inputs are 5V tolerant and reverse polarity protected. All outputs are shortcut protected.
Micro USB socket with external pads for soldering user connector.
All connectors are compatible with previous autopilot/OSD 2.x, all existing sensors/devices are compatible (GPS, Airspeed, temperature, camera, Vtx, current sensor)
New power manager board integrates voltage/current sensor with two high current UBEC: 5-6V/4A and 11-12V3A, with thermal and shortcut protection. Supports 3S to 6S batteries and 66A current.
New system 4.0 is available in Pitlab Shop and in our distributor in France FPV-FLY
New patch 2.70a pre-release version is available for download.
Chanes and new features:
Fixed issue: OSD randomly blinks in negative all GPS fields.
Fixed bug: OSD did not permanently store 0km/h takeoff speed value.
Fixed bug: OSD did not permanently store acceleration speed less than 0.4g
Ground Station: Added support for direct mavlink USART telemetry input. Now GS can display telemetry data in mavlink format, log these data on SD card and control tracking antenna based on mavlink data. This allows to use GroundStation with 3-rd party system (FS/OSD) equipped with mavlink telemetry downlink.
We decided to change this version number from v2.62 to v2.70 , so this release candidate has version number 2.70rc4.
In this version some minor bugs were fixed:
OSD:
Added full support for Ublox N8 series (new GPS in Pitlab shop) with GPS/GLONASS/GALILEO and diagnostics options.
Added GPS_RAW_INT message in OSD mavlink output .
Initial/startup throttle low checking level is changed from fixed 1100us into 100us above throttle trim (for internal combustion engines and some ESC with zero level above 1100us)
Bug fixed: GLOBAL_POSITION_INT field ‘heading’ is now in centi-degree (previously was in degrees)
Bug fixed: GPS_SYS_STATUS field ‘current’ is now is in 10mA untis (previously was in 1mA units)
Autopilot:
Initial/startup throttle low checking level is changed from fixed 1100us into 100us above throttle trim (for internal combustion engines and some ESC with zero level above 1100us)
New firmware is ready with some bug fixed and new features added:
OSD:
Added message MAVLINK_MSG_ID_GPS_RAW_INT in OSD telemetry output with number of satellites.
Added option OSD menu->GPS settings->HDOP to set minimum HDOP value required for store base.
Added option for horizon (pitch/roll: AHRS_TRIM_X and AHRS_TRIM_Y) correction for mavlink FC
Added support for BATT_LOW_VOLT settings
Added option for store trims in mavlink FC
Changed GPS protocol: Removed GSV (satellites in view) message. This message may cause problems with UART communications when GPS is tracking extensive number of satellites (GPS+Glonass+Galileo)
Removed satellite status submenu (due to GSV message removal)
Removed DEMO submenu
AP:
removed bug with Minimum GPS speed settings (multiplied by 3)
Added safety feature: when AP is powered up with throttle stick up (above 1100 microseconds) AP will keep throttle output low (and other channels neutral) until user moves throttle stick down (below 1100us)
FPV_manager:
Removed problem with maps in Windows 8 (browser compatibility)
New version 2.62rc2 (release candidate 2) is ready for download – link for download is as usual on the left menu.
In this release some bugs are fixed:
sometimes OSD overlay disappears for a short moment.
Editing RC monitor in one layout may destroy settings for monitor on other layout.
Wind course from pixhawk was reversed (180 degree)
FPV_manager stores wrong altitudes to OSD when “Altitudes above” is set to “ground”
And some new functionalities are added:
New options for user A2 input (pulse high time, pulse low time , period, freqency, duty)
Added chackbox [x] always celsius in temperature field for some countries where imperial units are in use except temperature (e.g. UK, India, Austrailia, New Zeland)
Automatic wake-up and re-initialisation of GPS in case of GPS errors during flight
Added option [x]elevation in variometer field which shows current airplane elevation and current glideslope.
Option to show consumed Wh (watt-hours) instead of mAh in battery capacity field
Option [x] mute sound in variometer field
Waypoint maximum altitude extended up to 2500 meters
Autopilot’s maximum altitude limit for autonomous flight extended to 2500 meters
Added throttle management in takeof functionality (cut off or limit throttle on ground and enable throttle after acceleration/speed detected), for hand lanuch of flying wing or catapult launch
First firmware 2.62rc1 with status “release candidate” is ready for download.
Release candidate means that all functionalities are completed and tested, and all known bugs are fixed. If no new bugs were discovered this version may become oficial release.
In this release:
-In OSD menu Service->GPS settings there is a new option GSP status, which shows detailed status of GPS. This option may be inoked also during flight.
-bug fixed in channel monitor, which also disturb wind assistant measurements.
-Added new RC channel monitor option for “centered” percentage indicator with range -100%….100% and zero at 1500 microseconds.
-Waypoint list for APM/Pixhawk shows now altitudes with proper type icon (relative, terrain or above sea level)
After many tests and response from beta-testers new firmware 2.62beta9 is ready.
-Faster autopilot’s response to mode change.
-Faster throttle response to AUTO mode change.
-Mountain mode initial circling radius is set to 100m (can be changed during circling by rudder stick)
-Fixed bug in course to base indicator for APM/Pixhawk
-Automatic magnetic course selection for APM/Pixhawk
-Fixed bug in symbolic RC channel names recognition (throttle/pitch/roll) for APM/Pixahwk
-In waypoint list now OSD presents azimuth/distance to next waypoint for APM/Pixhawk (like in MissionPlanner)
-Added option for clearing inactive buddy flight positions
-Added information about all buddy flight GPS positions (in BuddyFlight submenu)
-Faster buddy flight position refresh
-zoom submenu moved into layout
Latest informations and BETA /TEST versions 2.7x of Pitlab FPV System: OSD, Autopilot, GroundStation and Tracking antenna