Piltab FPV System can work with EagleTree Airspeed sensor v3.0.
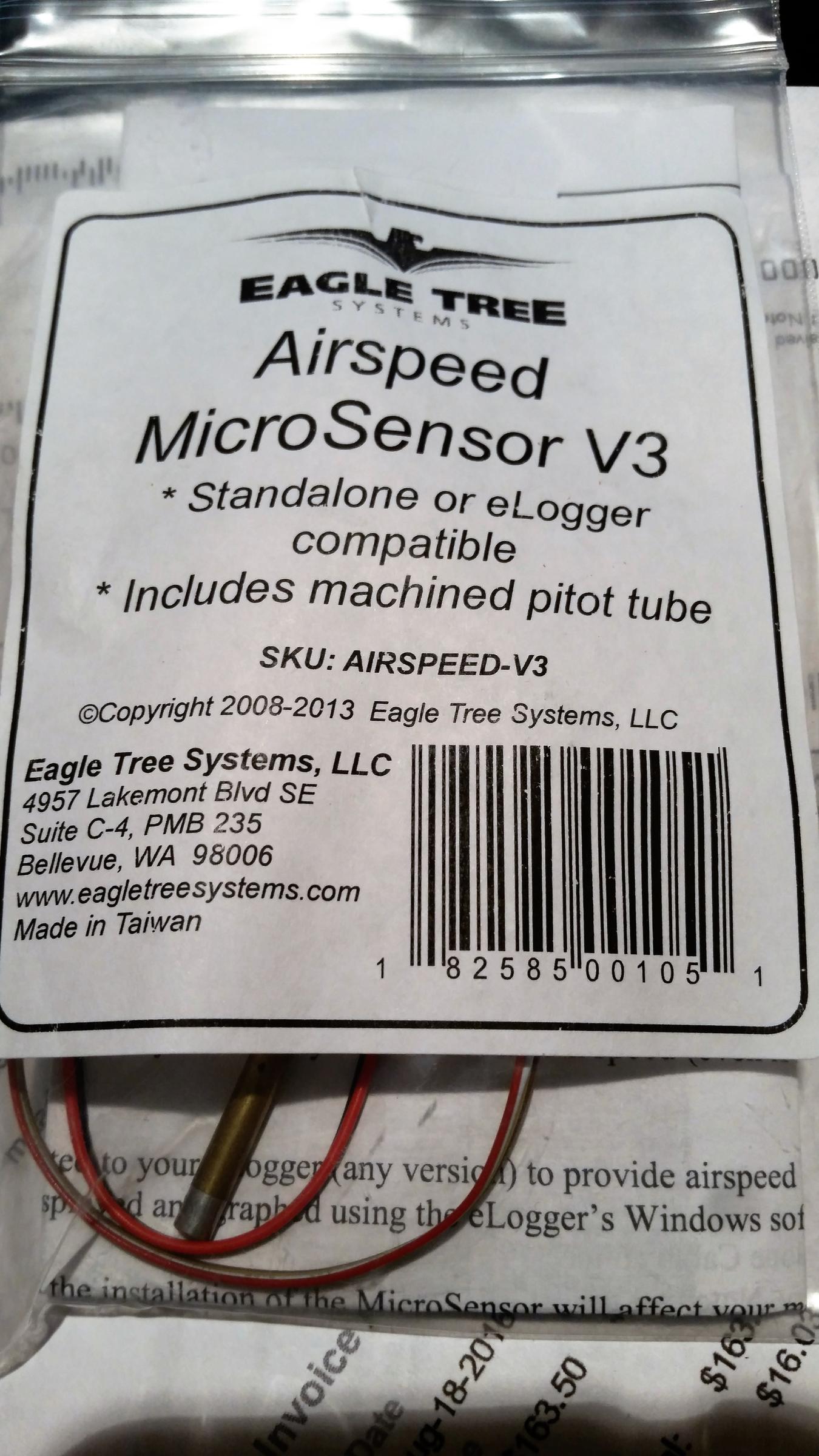
This sensor has got uncompatible plug, so we need to solder new one. OSD uses JST 4 pin connector, which may be purchased from Pitlab website or any other source (This same plug is used for most 3S LiPo batteries as balancer port).
Solder new plug according to following picture:

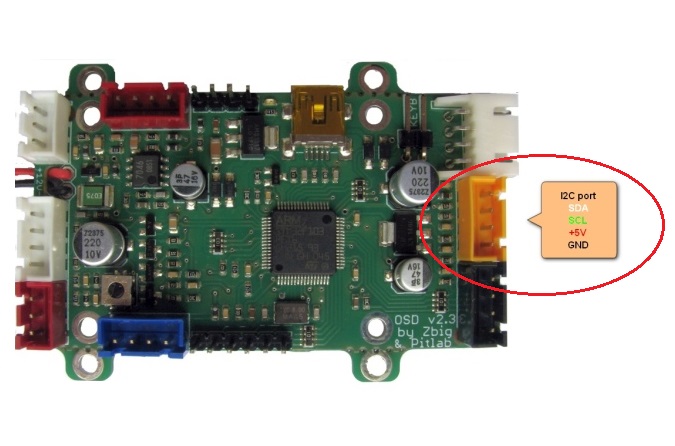
Connect airspeed sensor into OSD board into yellow I2C port.
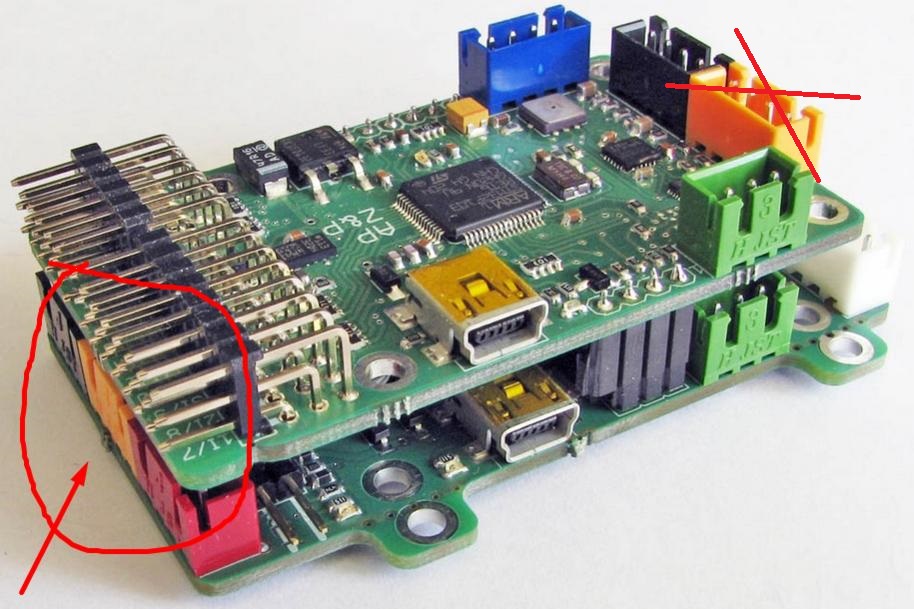
NOTE: If you use combo set OSD+AP, connect sensor to OSD (bottom) board (not autopilot upper board!)
After proper connection OSD will recognize airspeed sensor during startup:

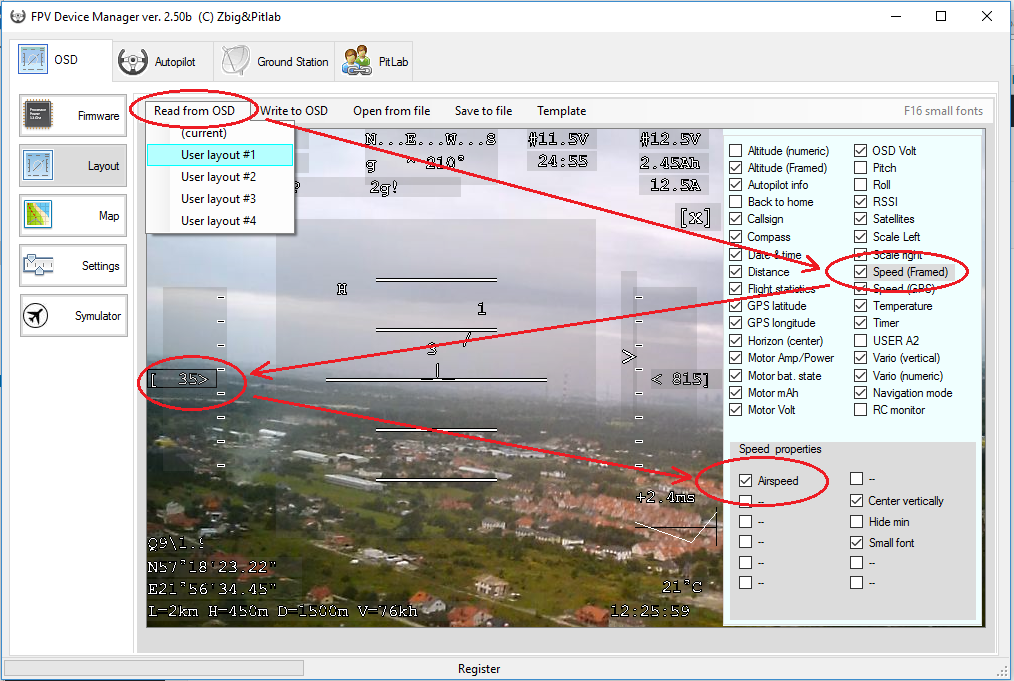
Airspeed data is not used by system for flight/navigation purposes, but OSD can show airspeed in one of speed fields. To configure it connect OSD into PC computer with USB cable and run FPV_manager. Open OSD tab and then layout page. Read layout from OSD (or use new layout template), and then enable speed (framed) field and check its [x]airspeed property and save layout into OSD.