Firmware 2.5x is compatible with all OSD boards (v2.0, v2.1, v2.2 and v2.3).
Firmware 2.5x is compatible with all autopilot boards (v2.0, v2.1 and v2.2).
Firmware 2.5x is compatible with all Ground Station boards (v1.0 and 1.1).
Note: This is the last firmware version that will be compatible with OSD boards v2.0 and 2.1.
All future major releases will work only with board v2.2 and v2.3 (produced and sold since July 2013).
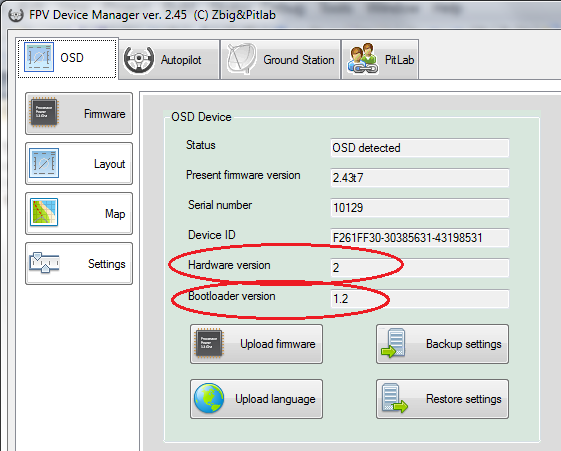
The FPV_manager can be used to determine the version of the OSD board if you are using bootloader version 1.2 or later. In the FPV_manager, hardware version 2 means v2.2, and value 3 means v2.3. Any other value (0 or “unknown”) means boards v2.0 or v2.1.
Figure 13 – FPV_manager with hardware and bootloader version
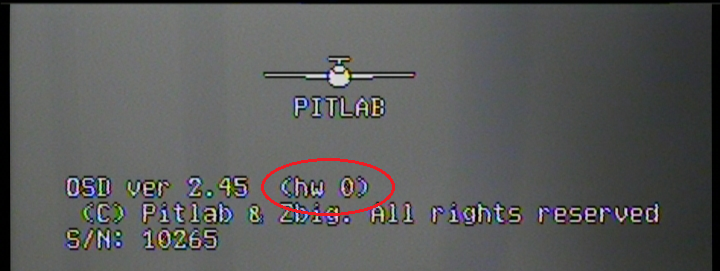
Alternatively, during OSD startup when using firmware 2.50, the hardware version is presented on the screen regardless of the bootloader version. The text (hw 2) means v2.2, (hw 3) means v2.3 and the text (hw 0) means boards v2.0 or v2.1.
Figure 14 – OSD screen during startup with firmware 2.50